
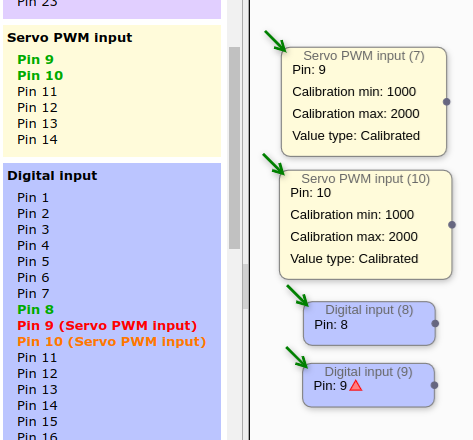
Pin 9 has also been selected for use as a digital input but conflicts with a higher priority feature, so is shown in red along with the name of the other feature it conflicts with.
There are no conflicts for pin 10, but since it has already been allocated by a higher priority feature, is shown in orange as a reminder/warning in every feature where it will not be available.